はじめに
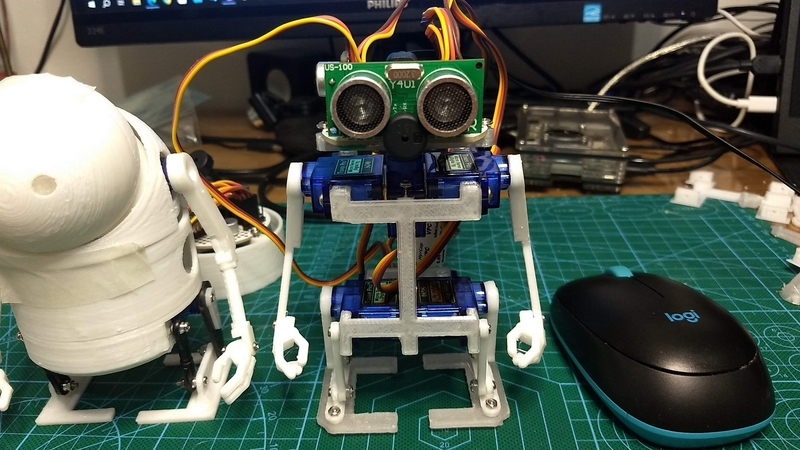
やっと久しぶりの二足歩行ロボットの公開用のモデルのフレームがほぼ完成しました。
結局
ニーアオートマタに触発されて円筒形の外骨格フレームで作り始めましたが、3Dプリンタでの印刷に結構時間がかかってしまうので、コンパクトな背骨型の内骨格フレームに落ち着きました。
このままだと機械生命体似の外観パネルは装着できませんが、そもそもこのサイズ感で、色々なセンサを頭部につけるのが難しかったので、円筒形フレームは一旦諦めました。

ただ、パット見は随分違いますが、肩の位置や足や腕の長さなどの基本的なサイズはほぼ同じにしているので、モーションはだいたい同じで良いはずです。なので、一旦モーションやプログラムが出来上がったら、上半身だけを作り直して、機械生命体似の外観に仕上げることにします。
変更箇所
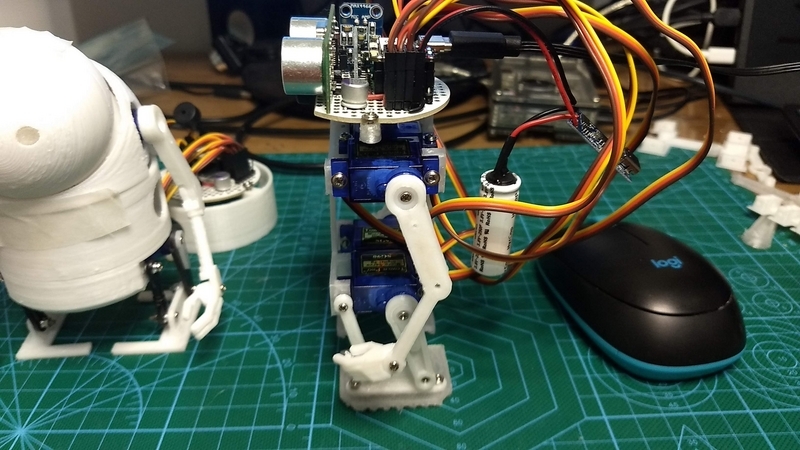
腕も肘の部分は歩行にはあまり関係ないのと、立ち上がり等のモーションを簡単にするため固定に変更しています。一方、二足歩行には重要な足裏(くつ)は、交換が容易なようにネジ止め式にして、滑らないようにギザギザにしました。
頭部について
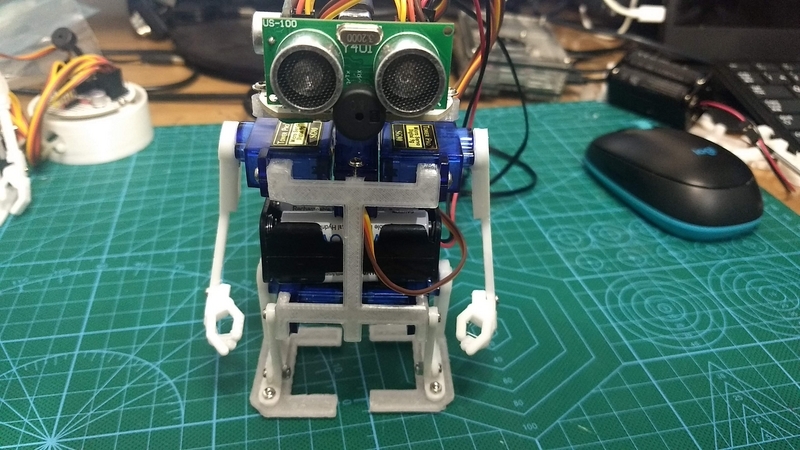
円筒形フレームと球形の頭部は一旦諦めましたが、そのかわりコントローラーとセンサー類を頭部にまとめて乗せるとができました。
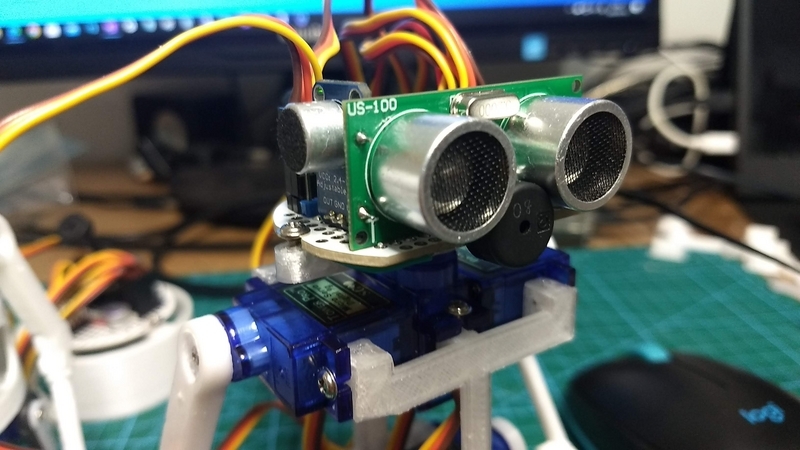
超音波センサにマイク、ジャイロ、圧電スピーカと、コントローラに付属しているフルカラーLEDと合わせると、二足歩行ロボットに最低限必要な機能をフルセットで一枚の秋月電子の円形基盤に載せることができています。
コントローラー
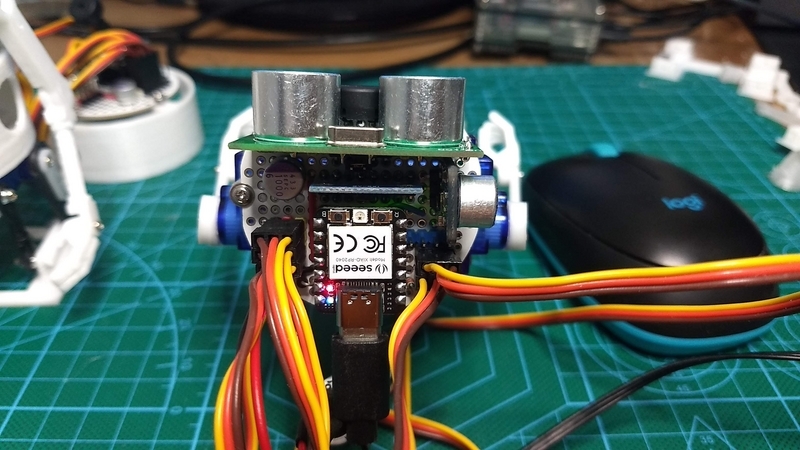
コントローラーには、SeeedのXAIO RP2040を使用していて、あまりピンはありません。何か追加する場合は、I2Cを引き出してセンサやLCDを追加することになりますが、ご覧の通り秋月電子の円形基盤上にギチギチに配置されています。
また電池も当初想定していたリチュームイオンキャパシタではなく、単4ニッケル水素充電池を搭載するスペースが確保できました。それとリチュームイオンキャパシタは軽すぎて、頭部の方が重くなっていたので、”重し”としてもニッケル水素電池の方がバランス的に良い気がしています。
おわりに
ぐるぐる回ってフレームは4足歩行ロボット「ナノ四駆」とほとんど同じになっていました。
なので、コントローラーをRaspberryPi Picoに変えて背中に搭載することもできるように、背中側のフレームには穴を開けています。RaspberryPi Picoにすれば、頭部はセンサだけにできるので、よりコンパクトにまとめることができると思います。
順調に行けば、3連休となる今週末には、基本動作の確認をして、いつもの3Dモデル共有サイトに
3Dモデルを公開できると思います。
おしまい
Amazon情報
今回コントローラは XAIOのRP2040を使うことにしました。ただXAIOシリーズならどれでも動かせるピン配置にしたつもりなので、多少プログラムを変更すれば、XAIOのどのモデルを使っても、この機体を動かせると思います。ただ書き込み動作が安定しているのはRP2040だけだし、良い位置にフルカラーLEDを搭載していて、かつMCUもデュアルコアでAI も搭載可能なので、当面はRP2040でソフトウェアの開発をしようと思っています。

四足歩行ロボットと違って、二足歩行ロボットは繊細なので、サーボモーターは純正のSG90が必要です。このモデルでは5個使用します。
")
ジャイロセンサはSG90と同じ梅本さんから購入するのが安心です。

今回の超音波センサーはUS-100を使用します。

音声マイクモジュールはMAX4466を使用したものを使用します。最近基盤の色が変わったようです。
