つづきに
先週は二足歩行メカの歩行する動画をアップロードしましたが、今週は公開用に3Dモデルに修正を加えました。
ストッパー部品の修正
スロットの幅と位置をいろいろ変えていたら、歩行の安定性に意外と重要だったので、ストッパー部品の形状を変更しました。
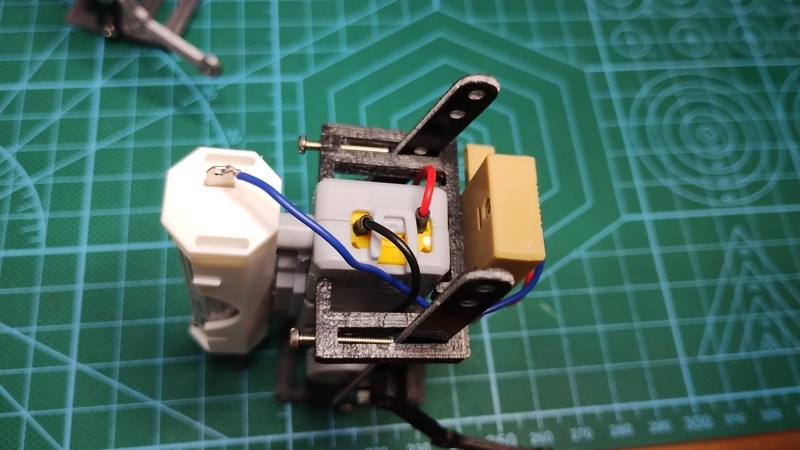
具体的にはスロットの幅を一杯まで大きくして、補強プレートの位置と振れ幅を2mmネジで両側からちょうど良いところに調整できるようにしてみました。これにより調整幅が広くなり、二足歩行が安定しました。
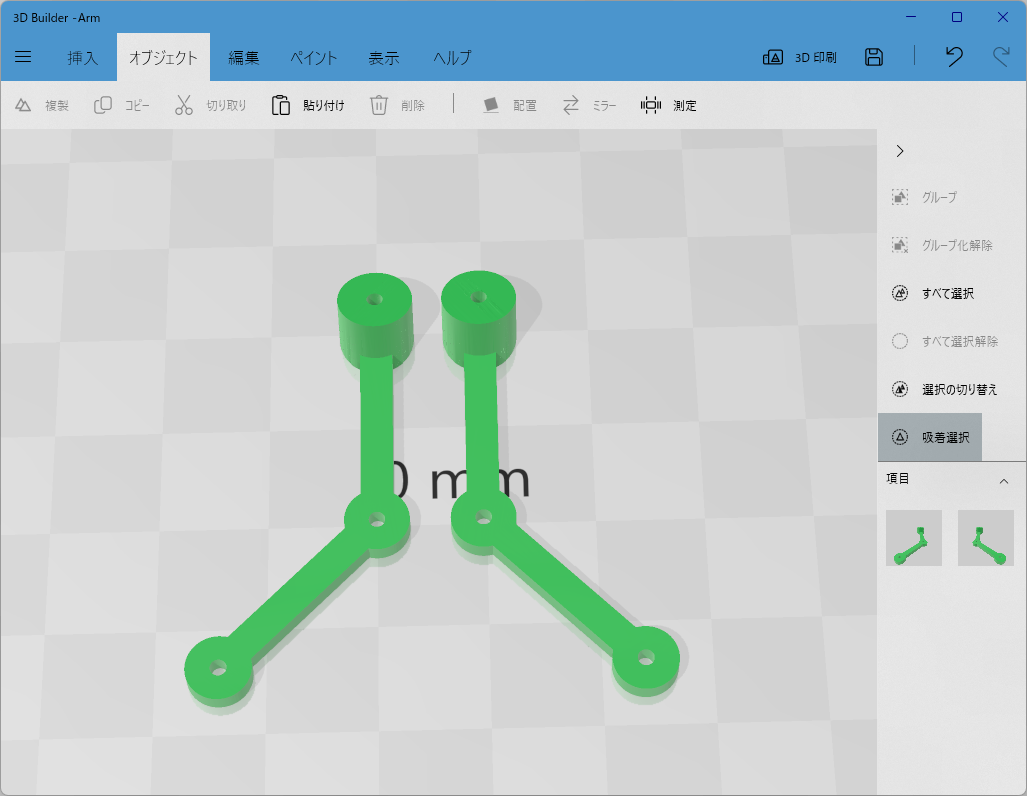
オプション部品作成
二足歩行には関係ありませんが、よりロボットぽく見えるようにオプション部品の腕を作成してみました。軸間距離は足と同じ20㎜にして、肩は15°外側に開くように傾けました。
印刷
3Dプリンタの印刷設定は、フィラメントはPETGフィラメントで、積層は0.25㎜、速度は30㎜/s、密度は20%です。印刷時間は約10分です。なので、全部印刷して1時間はかかりません。

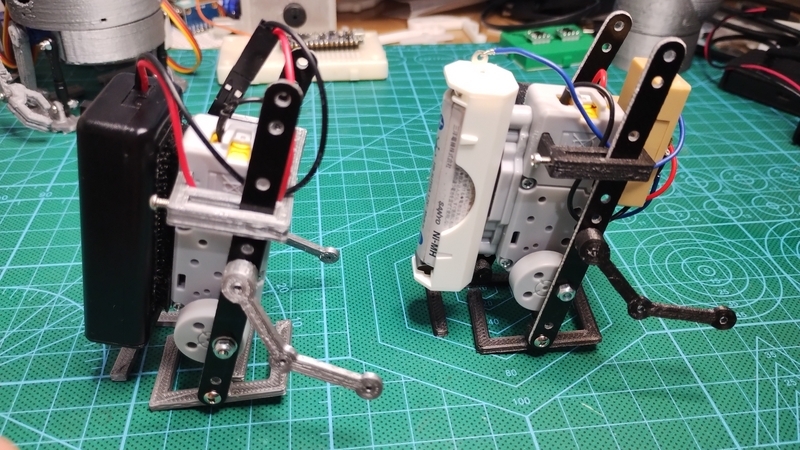
装着
手を付けるとよりロボットらしくなりました。ストッパーの形状もシンプルになりました。
つづきに
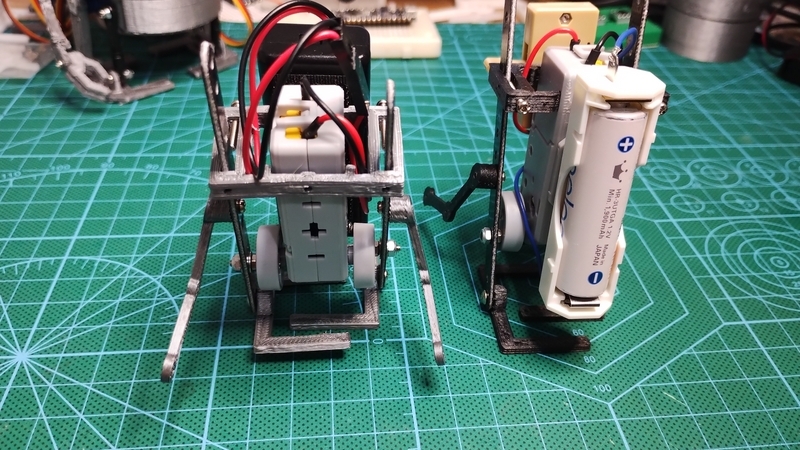
中野島ロボットでは3Dモデルの公開前には2台の3Dプリンタで印刷して動作を確認するのですが、今回も確認用にidbox!でカーボンPETGで印刷して2台で動作確認をしています。どちらもちゃんと組み上がって動いたので、3Dモデルはこれでほぼ完成です。
ただカーボンフィラメントだと粘りがあるので密度が20%だと隙間が空くかもしれません。小さい部品なので印刷密度は50%くらいにしても良いと思います。
つづく
購入品情報
単三エネループ一本では動きはしますが、組み付けによっては力が足りないようなので、安定動作のために単四電池二本を標準にしようかと思っていて、楽しい工作シリーズのスイッチ付き単四電池ボックスを購入しました。
")
カーボンフィラメントはこのメーカのものが良さそうです。色も選べます。
")