つづきに
今週はタミヤの単四電池ボックスを組付けてました。これでこのモデルの完成型なので、調整方法と遊びかたを残しておきます。

3Dモデルは以下のリンクから無料でダウンロードできます。
https://www.thingiverse.com/thing:6498946
電池ボックスの組立
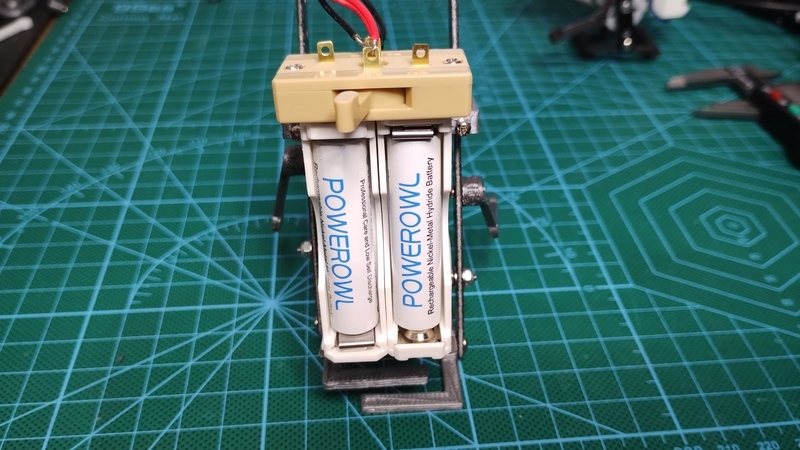
タミヤの単四電池ボックスを設計書通りに、直列接続になるように組み立てます。

薄型ギヤボックス付属のブラケットを使って、単4電池ボックスを付属のネジで取り付けます。
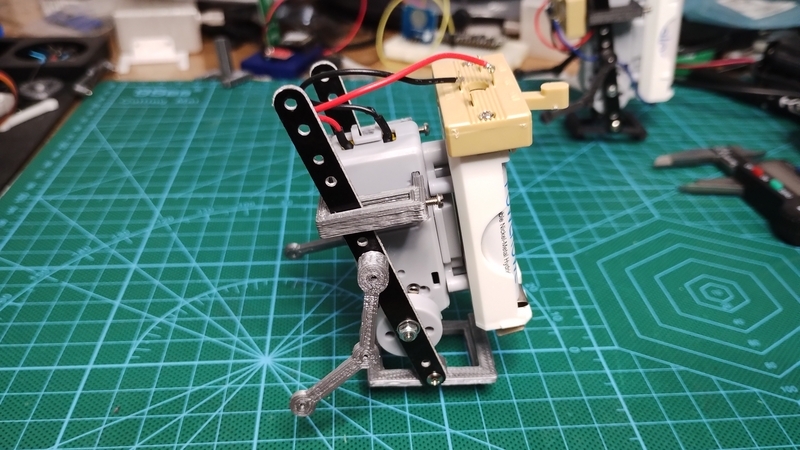
薄型ギアボックスのモーターとスイッチを配線すれば完成です。半田ゴテを使わずに二足歩行メカを完成させることができました。

調整
ニッケル水素の単四電池二本を取り付けて、スイッチをどちらかに倒してモーターが回転するかを確認します。
ちょうどクランクが上死点か下死点で停止するところまで回してスイッチを切ってモーターを止めます。どちらか一方の足首の角度を25度に調整し、横から見て左右の足首の角度が同じになるようにします。

上部のストッパはできるだけ前になるようにし、コンロッドとは1mm程の隙間が空くようにネジでスライド位置を調整します。
あとは実際に歩行して足首の角度を微調整します。
後ろに倒れる場合:角度が足りないので、角度を増やします。
前に倒れる場合:角度がつきすぎです。角度を減らします。
だいたい20~30度の範囲で安定するようです。
左右どちらか一方に倒れる場合は、クランクの左右の遊びで調整するか、クランク軸が緩んで(あるいは片方だけきつ過ぎて)いないか確認してみて下さい。
注意点
このモデルはあえて足を小さくして、少し不安定にしています。どうしても安定しない場合は腕に重しをつける等してみて下さい。
遊び方
二台作ればいろいろな遊び方ができます。

その1:短距離走 スタートとゴールを決めてどちらが早くゴールするかを競います。
その2:長距離走 どこまで真っすぐ歩けるかを競います。転ぶか壁にぶつかるまでの距離を競います。
その3:逆走 スイッチでモーターを逆転し、逆走で競います。
その4:レスリング 腕の角度を調整し二台でぶつからせて先に倒れた方が負けになります。
その5:相撲 腕の角度と足の角度を調整し、手をついた状態から立ち上がれるように調整し、立ち上がれないか、土俵の外にでるか、倒れるか、手をついた方が負けになります。
あえてこのモデルを不安定にしているのは、遊びの幅を広げることと、二足歩行のバランスの微妙さを楽しんでもらえるようにしたかったからです。各部を微調整をしたり、電池を変えたり、電池ボックスの直列と並列を変えたり、おもりで調整したりしても面白いと思います。
おわりに
今回はタミヤの部品を使うことで、3Dプリンタの部品を最小にした二足歩行メカを作ることができました。
この程度なら3Dプリンタが無くてもなんとか工夫してできるのではないかと思います。(あとは誰かがMakeしてレポートしてくれるとうれしいのですが。。。)
おしまい
部品リスト
 70245")


")