はじめに
2024年は初心に帰って二足歩行ロボットを中心に活動しようと思っていて、そこでもう一度一軸の単純な二足歩行ロボットから研究をしています。そこで参考になるページを見つけました。
ここの二足歩行ロボットとタミヤの薄型ギアボックスの作例を参考にして、一軸の二足歩行ロボットを作ってみます。
参考ページで残念なのは、部品の穴位置が明記されていない事です。部品の穴位置などの寸法が判れば再現率が上がると思うのですが、この記事ではそれをカバーして再現性の高い二足歩行メカ作ってみます。
部品購入
部品はタミヤの新しくラインナップされた薄型ギヤボックスを使います。この紹介ページにも二足歩行ロボットの作例があり、ちょっと感動しました。
 70245")
また、再現性を高めるために、タミヤのミニ四駆の部品のマルチ補強プレートを脚として使用します。
マルチ補強プレートには種類がいろいろありますが、No.193の古い方です。

同じくミニ四駆のビスセットBを使います。12mmのビスとナイロンロックナットを2個づつ使いたいだけなので、無くてもなんとかなります。

部品の費用は3Dプリンタ部品を除いて、1000円ちょっとくらいでしょうか。
モデリング
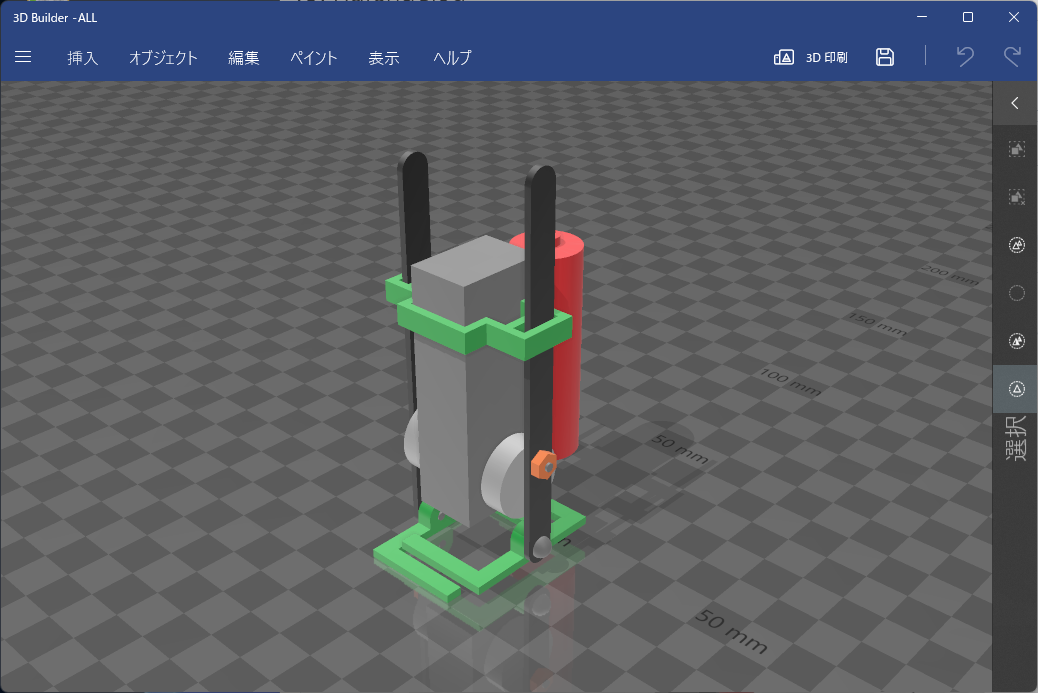
いつものように、モデリングはWindows11でMS 3D Builderで行いました。と言っても3Dプリントするのは、左右の足とフレームの緑色の部品三点です。とてもシンプルな造形になりました。
印刷
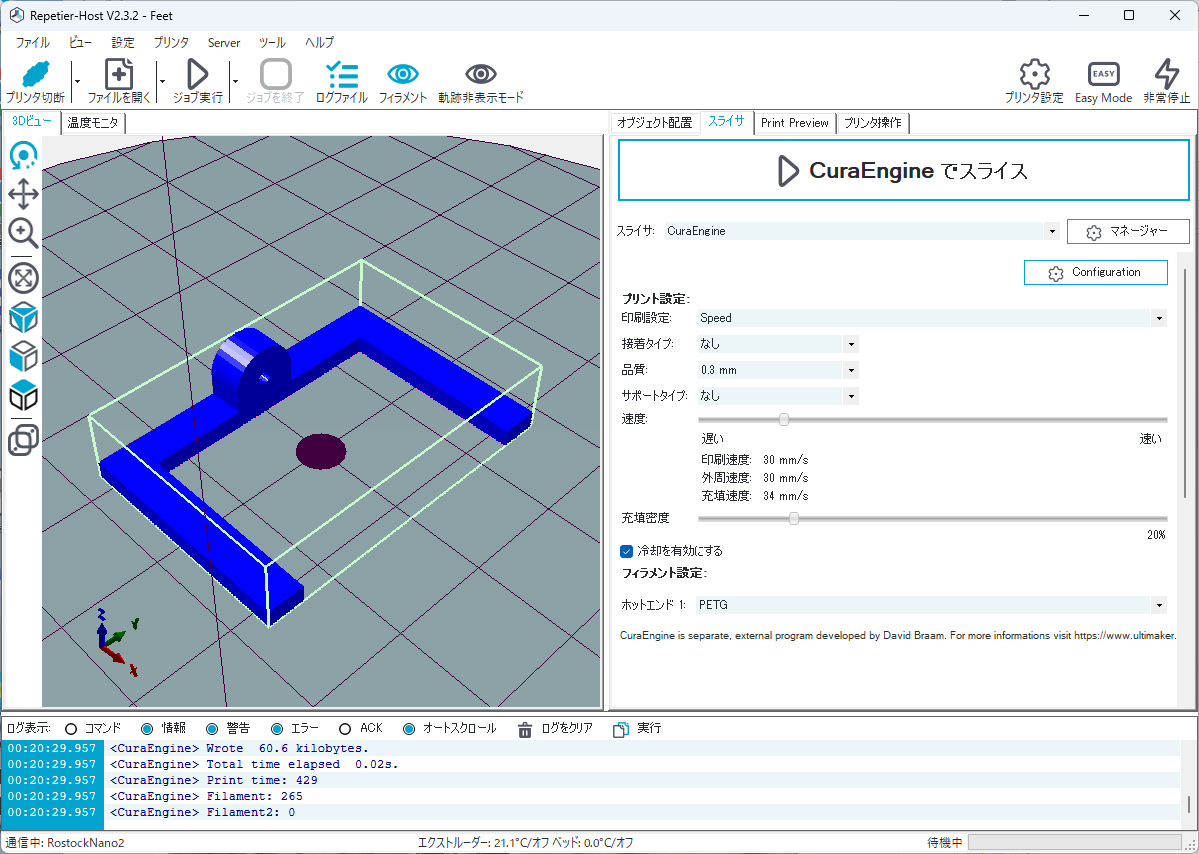
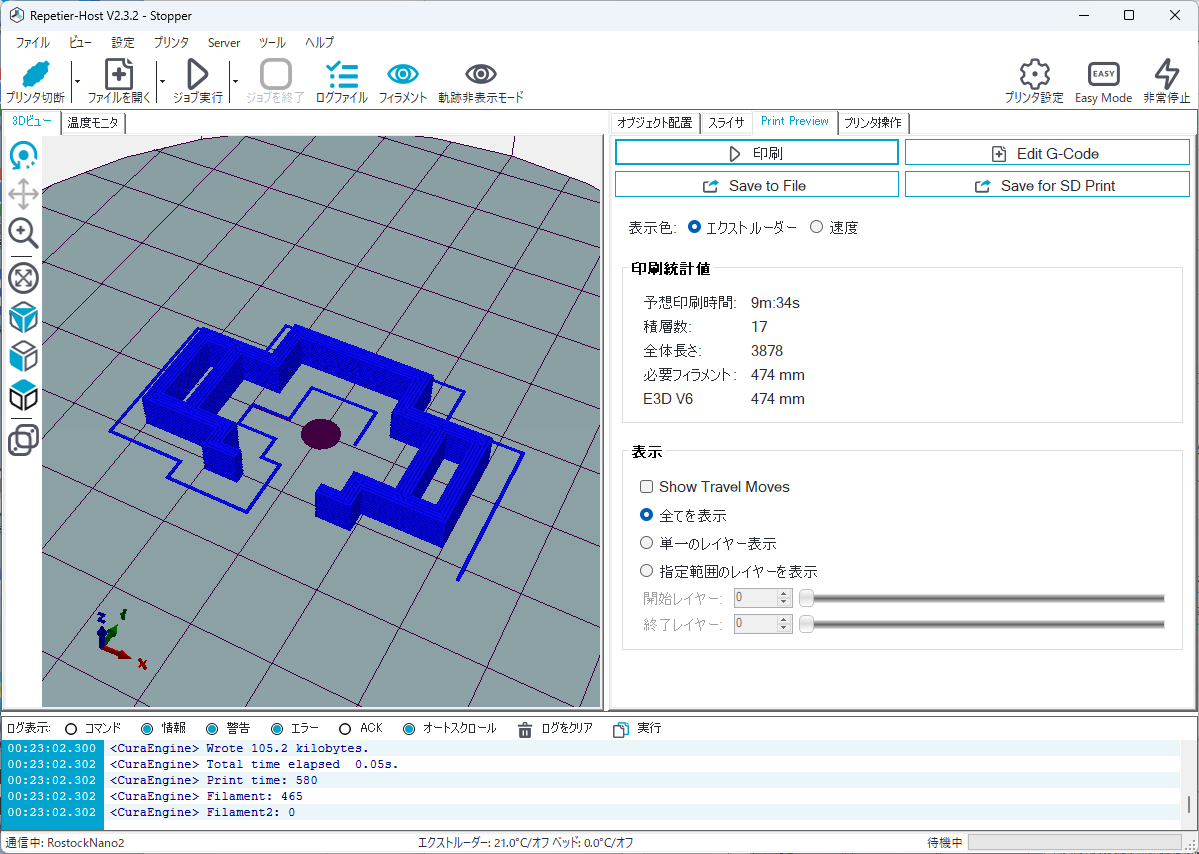
モデリングした部品を3Dプリンタで印刷します。フィラメントはPETGで積層は0.3㎜、速度30㎜で印刷します。片足がRostockNanoなら7分で印刷されます。
もう片足とフレームを印刷しても30分もかからないと思います。(といってもこの形状にたどり着くまでに、24時間くらい費やしています。)
組み立て
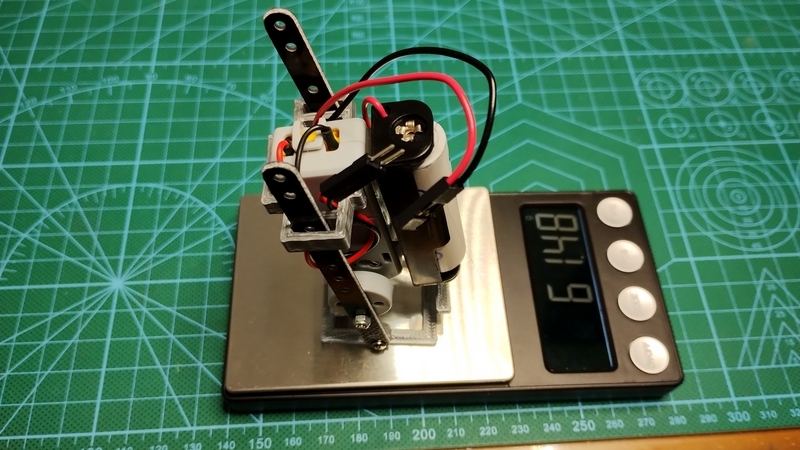
タミヤの薄型ギアボックスを組み上げて、単三電池ホルダーを両面テープで背負わせたらあっという間に二足歩行メカの完成です。

足首の角度を15度くらいに調整して、単三エネループ一本でゆっくり歩きだしました。
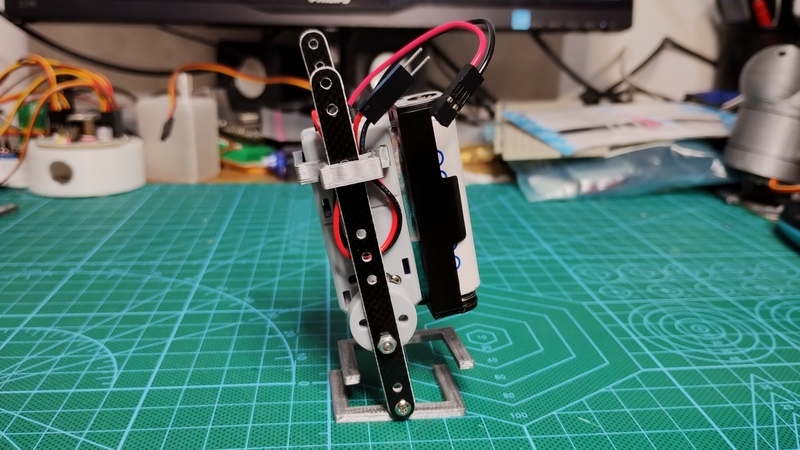
重さは電池込みで61.5グラムと言ったところです。とても軽くてシンプルです。
つづきに
参考のものより足をだいぶ小さくしているので、転ばずに歩かせるにはちょっとしたコツがあったりします。次回はチョコチョコ歩き回っている動画を紹介しようと思います。(モデルも気が向いたらそのうち公開しようと思います。ほしい人いるかな?)
つづく
参考情報
3Dプリンタが無くても、これなら簡単に二足歩行メカが作れます。(中野島ロボットは買っていません)
この電池ボックスを買いに近所のビックカメラに行ったのですが、入手できませんでした。結構電流を流すので、板バネの電池ボックスが良いのですが、仕方なく手持ちの単三一本のホルダーを使っています。
")