はじめに
残念ながら GUGEN では評価されなかった 「座椅子」 ロボットですが、このロボットを作ることで自分ではかなりのブレークスルーがあったので紹介します。
なお他の皆さんのGUGENの優秀な入賞作品はこちらから
https://gugen.jp/result/2023.html
薄い
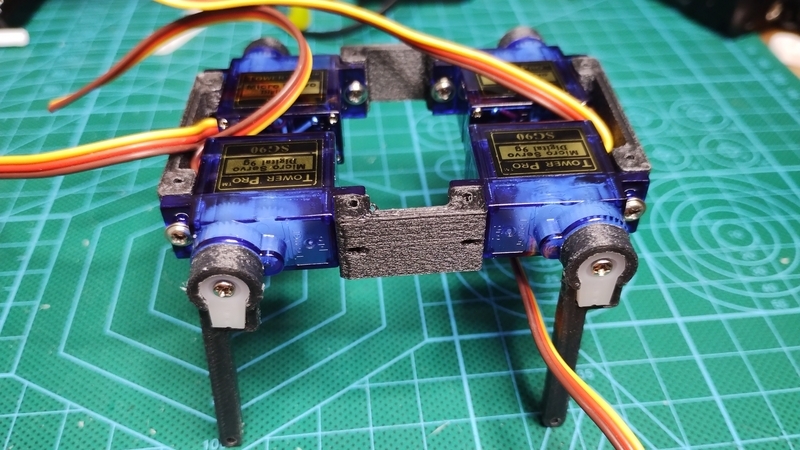
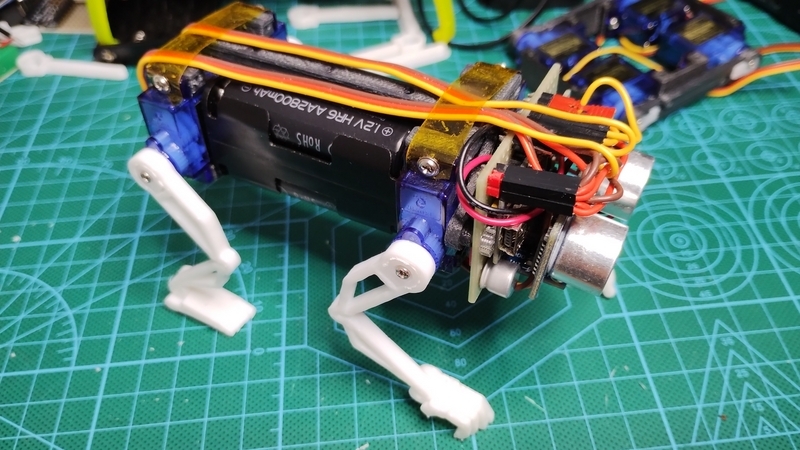
今回の四足歩行ロボットはとっても薄く仕上がりました。もうSG90だけって言うくらいです。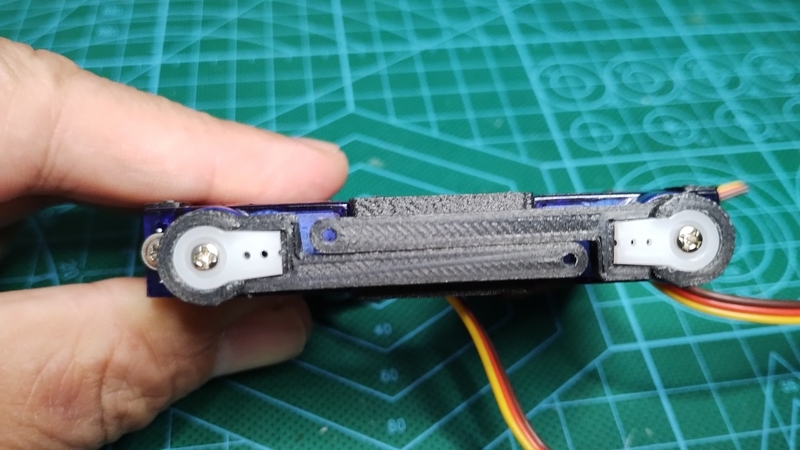
3Dプリンタを買う前に「SG90四つ繋げたら、ロボットになるのでは?」と思っていたのが、これがテコテコ歩くのを見るとそれが実現した感じです。
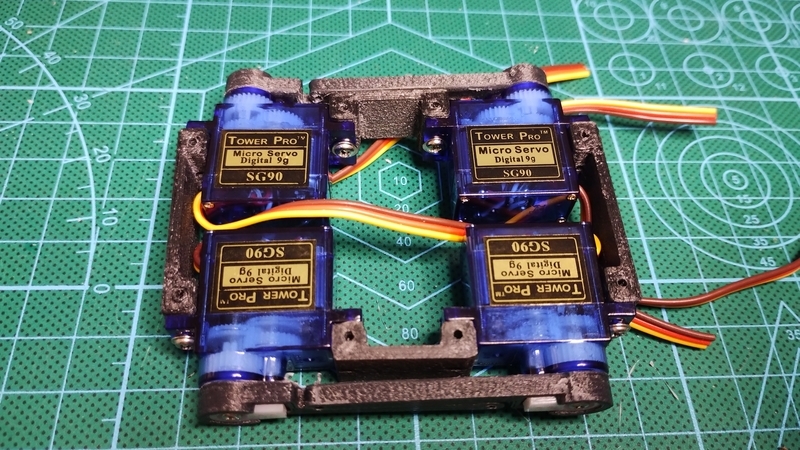
これくらい部品が少ないと3Dプリンタでの印刷時間も短く、失敗も少なくて助かります。
ブレークスルー
中野島ロボットには SG90を四つ積んだ Thingivers に公開しているロボット「ナノ四駆」があるのですが、これはSG90の付属のサーボホーンを使わないようにできた事が、当時の中ロボとしてはブレークスルーだったのです。
しかし、使用するフィラメントの特性によって滑りやすかったり強度に問題があり、しばらくするとサーボホーンが割れてしまったり、滑り始めたりして、なかなかうまく長時間動かすことができずに、テストソフトまで公開して開発が途中になっていました。
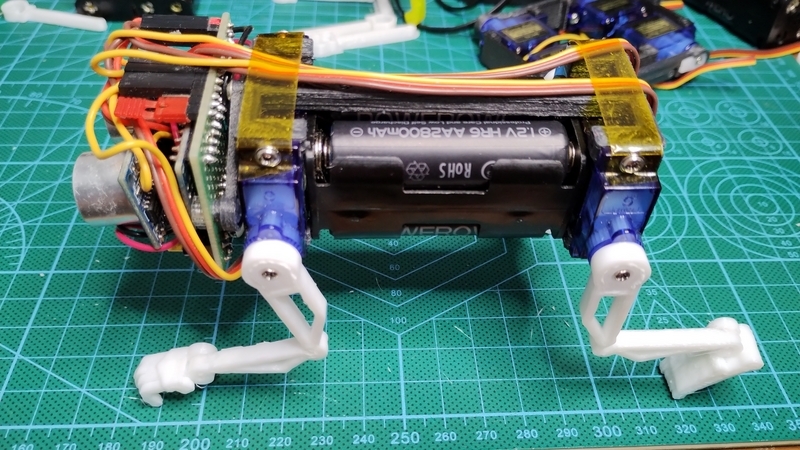
今回は「座椅子」を薄く仕上げる必要から、サーボホーンを切って、ネジを使わないで止めるようにしています。
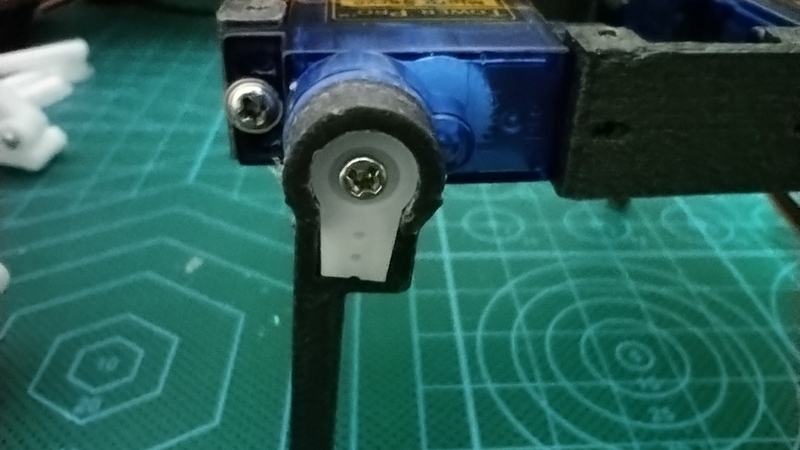
でなにがブレークスルーだったのかと言うと、サーボホーンと足を止めるM2×4mmのタップネジを不要にできた事なんです。
これまでの殆どの中ロボのロボットは、SG90のサーボホーンをネジで止めていたんですが、写真の通りネジを使わなくてもしっかり止まって動かすことが確認できました。
つまり、SG90に付属するネジだけで、このロボットは組み上がるのです。
M2×4mmのタップネジって意外と入手が難しかったのです。
勢いあまって
そうとなればと、ソフトウェアが途中になっている「ナノ四駆」の脚を作り直してみました。
今回は足の向きを獣脚から、類人猿足に変えてみました。(ついでに足先と手もそれらしく造形してみました。)
本当は
センサで自律的に障害物を回避して、部屋中を走り回るロボットが作りたくて「ナノ四駆」を造形したのですが、それにはソフト開発に時間もかかってしまうので、最近覚えた赤外線コントロールで走らせようと思います。しかし、足と手はちょっとやりすぎ感があるので、オリジナルのイボイボ足に変えるかもしれません。
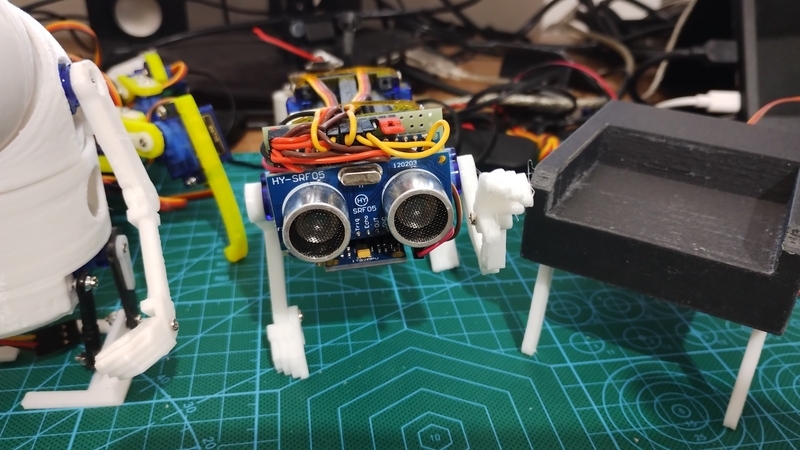
ちなみに現在の愛称は「ピークちゃん」です。
おわりに
GUGENでは全く評価されませんでしたが、「座椅子」もこの薄さと印刷の簡単さは、入門用ロボットとしては面白いと思うので、そのうちモデルを公開しようと思います。(いつになることやら)
おしまい
購入品情報
Tower Proの純正SG90サーボモーターですが、おっとまた値上がりしているな~。一個820円は1.5倍に値上がりしていて厳しい感じです。
")
4足歩行ロボットならソースコードの変更が少し必要ですが、互換品で良いかもしれません。こっちも1.5倍に値上がりしていますが、5個で1700円くらいです。ただし互換品を買うならMiuzei以外のものは買ってはいけません。耐久性や特性が大きく異なります。
