ホントは
ラズパイピコを乗せるはずだったのです。ですがイロイロあって、Arduinoを乗せています。さらに現在公開したスケッチはXIAO用です。そのへんの下りを書いておきます。
基本構想は
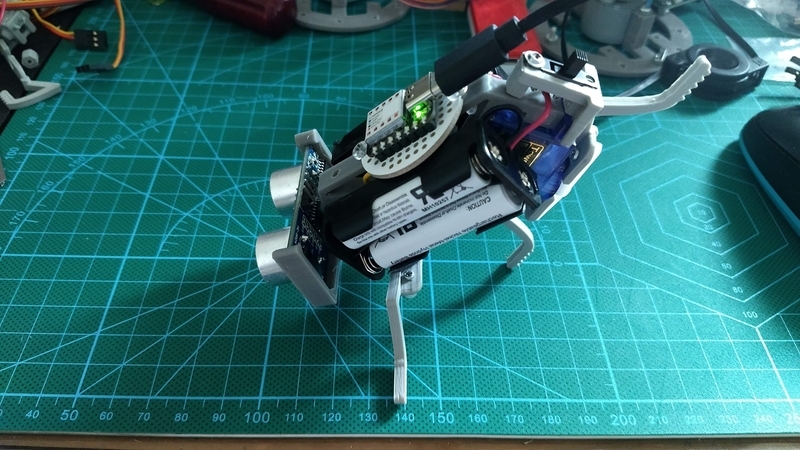
ラズパイピコを乗せて、センサーは超音波センサーを乗せるつもりでした。

これはこれで可愛かったのですが、超音波センサーでは安定した距離が計測できないので、シャープの定番赤外線センサーに入れ替えましたがこれも駄目で、結局ToFセンサーに入れ替えました。
超音波センサーや赤外線センサーは壁に角度が付くと超音波や赤外線が違う方向に反射してしまい、間違った距離を計測してしまいます。このモデルは原理的に歩行時に視線が上下に動くので、壁に対してどうしても角度がついてしまいます。
あらよっと。
中脚を外して無理すれば意外と面白いポーズが取れます。そりゃ〜

ある姿勢の時に計測するなど、工夫すれば超音波センサーでもある程度正確に壁検出出来ると思いますが、プログラムが複雑になるので、今回は採用を諦めました。またシャープの赤外線センサーも壁と角度がつくと計測が安定しませんでした。(どちらのセンサーも取説に検出物と正対させることと書かれています。)
コントローラーは
もともとはRaspberry Pi Pico乗せることを想定してこの機体を開発していました。なのですでに公開しているピコ用のケースがピッタリ乗るように、フレームのサイズを調整してあります。
Candy Caseのbottom2を印刷すると、この機体にピッタリ合うはずです。(合わなかったらコメントして下さい。直ぐに対応します。)ちなみにフレームの穴位置は、秋月のDタイプ基盤と同じ位置、つまり穴間距離は42mmになっています。

しかし
Raspberry Pi PicoのCPUにバグが多数発覚して、ちょっとへこんでしまったのと、Seeeduino XIAORP2040が入手できなかったので、Arduino Nano を使ってスケッチを開発しました。しかし、Nanoでは機体とのサイズ感がいまいちだったので、Seeeduino XIAOに変えて、スケッチがXIAOで動くようにしてやっとGW最終日に公開できたのでした。
そうだ
ロボットの名前は「ちいさいロボット1号」でいいかな。Picoも小さいって意味だし、XIAOも中国語で小さいって意味だし、「小型機器人 1 號」、英語なら「Pico Robot No.1」かな。
おわりに
1号があるなら2号が有るのかとなりますが、有ります。まぁ基本は同じなのですが、当然1号のモーションを研究して進化しています。でも、もう少し1号でモーションやスキンを考えて遊んで見るつもりです。
ただ、SG90用の超音波センサーホルダーの3Dモデルは、作るのにマル3日もかかったし、これはこれで、良い造形だと感じているので何か生かせるものを公開したいと思っています。
おしまい
購入品情報
ホントはこれを乗せるはずでした。Picoケースと一緒に印刷すれば、Picoを載せてスケッチを書いても「小さいロボット1号」はトコトコ動かせるはずです。

次にこれを載せようとしましたが、RP2040のCPUバグの影響か一時的に入手できませんでした。CPUバグの回避方法が判ったので、販売が再開されたようです。でもAmazonではまだ少し高いですね。
