はじめに
小さな産業用ロボット風のディスクトップに置けるロボットアームの3Dモデルを Thingiverse に公開しました。
名前は「Nano Robot Arms」にしました。日本名は「両腕(りょうわん)」にします。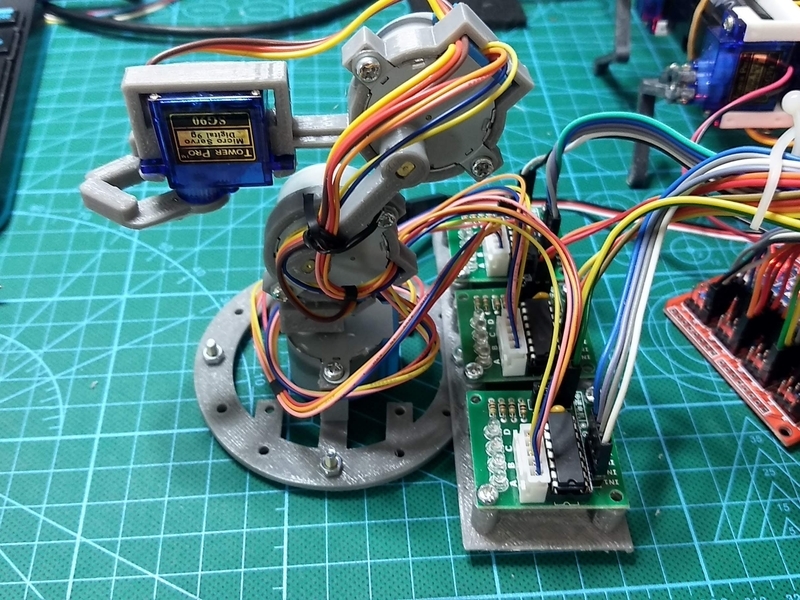
だれでも以下のリンクから無料でダウンロードして、作ることができます。
www.thingiverse.com
組み上がると腕の長さが8cmと、ホントに小さいロボットアームです。
印刷部品
3Dプリンタで印刷する部品は全部で6つです。一番下のサーボモータの固定を自分で考えるなら、3~6の4つの部品を印刷すれば良いと思います。
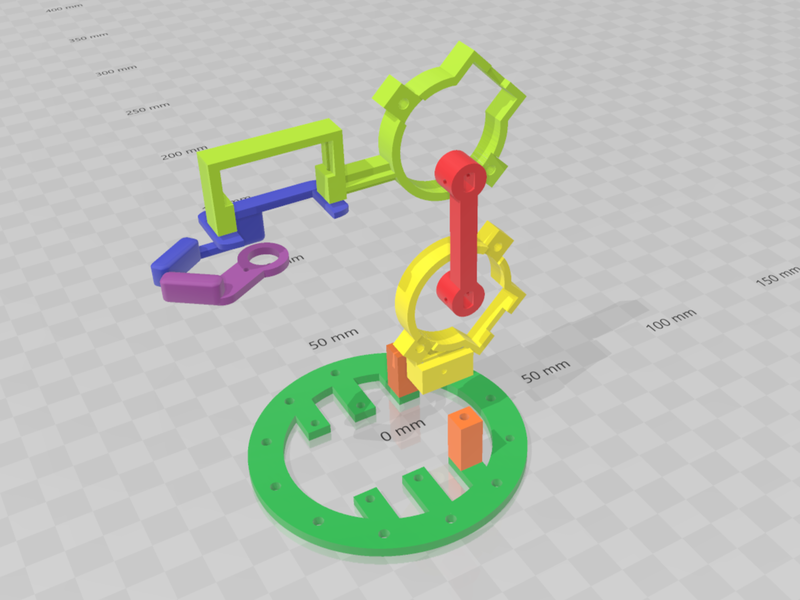
1BaseRing.stl 台座です
2Stand.stl ロール軸を固定するスタンドです。
3Rolll.stl ロール軸と28BYJ-48 を固定します。
4MiddleArm.stl 中間のアームです。軸間距離は35mmです。
5SarvoArm.stl サーボを取り付けるアームです。軸間距離は45mmです。
6SG90Hand.stl サーボアームです。
ハードウェア
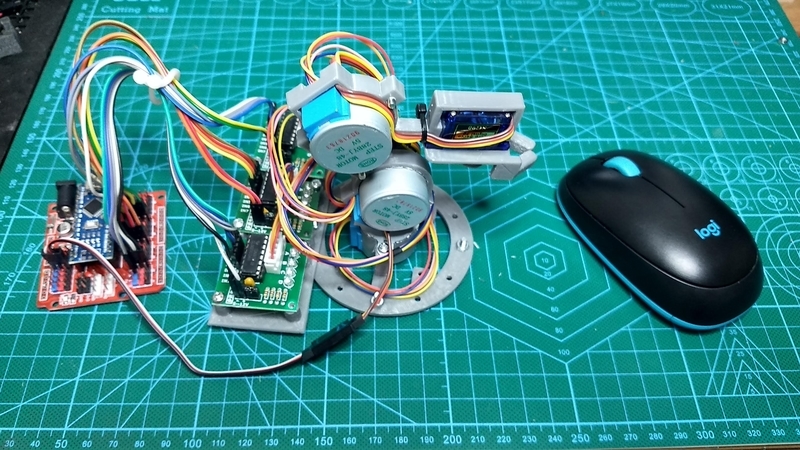
ステッピングモータ 28BYJ-48 5V×3
ステッピングモータドライバ:ULN2003 ×3
サーボモータ:Tower Pro SG-90
コントローラ:Aruduino Nano Clone
電源:単3×4
M3 ネジ 8本
M2 タップネジ 1本 SG-90 サーボホーン固定用
開発環境
PC:Raspberry Pi 4B (OS Bullsyse 64bit)
統合開発環境:Arduino IDE
ライブラリ:Stepper.h Servo.h
組立方法
印刷した部品とハードウェア部品を組み上げて行きます。ステッピングモータの軸を3Dプリントした部品に差し込んで行けば完成します。軸の固定が緩いようなら、穴を開けているので、M2ネジで固定して下さい。
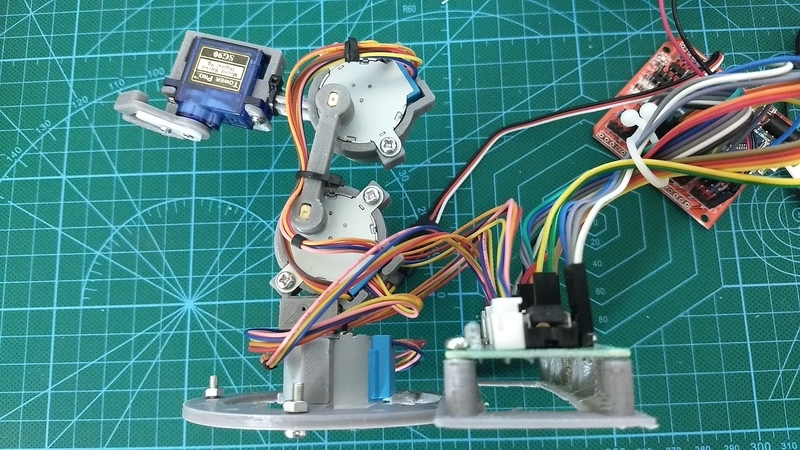
台座は固定箇所が3か所あるので、バランスを見て決めて下さい。最初は真ん中がいいかな。
配線はステッピングモータの横に、配線を通せる隙間を用意しているので、そこを利用して下さい。
(!) 28BYJ-48のケーブルは細くても意外と硬い(フリクションが大きいと言う)ので、写真を見ながら余長を持って固定して下さい。
(中野島ロボットは後で、柔らかいケーブルに付け替える予定です。)
スケッチ
ステッピングモーター3個と、サーボモータ一1個を動かすだけなので、Arduinoのスケッチを公開しなくても動かせると思いますが、28BYJー48のドライバにはちょっとしたコツがあるので、テスト用のスケッチは後日公開しようと思います。
スケッチを清書するので、たぶん今週末にはアップできると思います。
おわりに
ちょっとリリースの順番が変わってしまいましたが、なんとか3月中に今年最初のロボットをリリースすることができました。
これが終れば、リリース予定だった、昆虫型のロボットの公開を進めます。
(このモデルは、バイオレットちゃんの手を作る習作なので、もしかしたらそっちを先に進めるかもしれません)
おしまい
購入品情報
28BYJ-48 ステッピングモータが3個必要です。ドライバーボードとセットでここが最安かな。ここ以外にも沢山あると思いますが、ステッピングモータは特性にあまり影響されないので、28BYJ-48 5V ならどれでも大丈夫だと思います。
ただ、同じ型番でも12Vのものがあるので注意です。

手の部分はTowerPro SG90を利用しました。SG90クローンの場合は特性が異なるので、今後公開するスケッチではうまく動かないかもしれません。その場合は自分で調整する必要があります。
")