はじめに
今週は昨年末から取り組んできた「機械生命体 ただしザコ」の動作確認を行いました。そして動作映像を撮影しました。
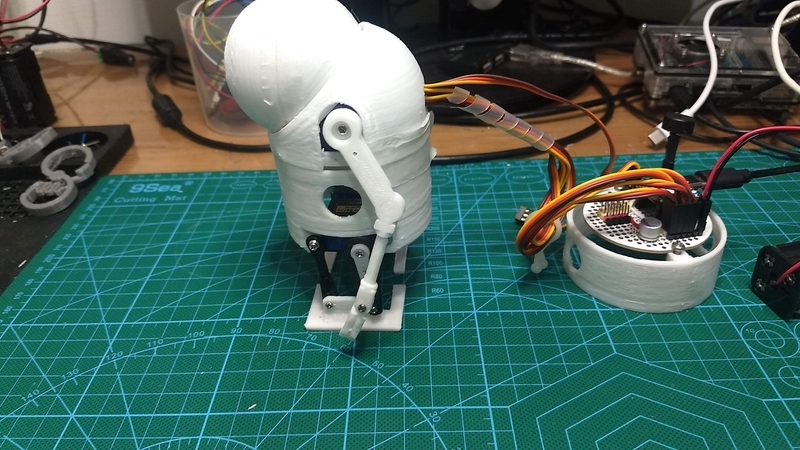
仮組
胴体はまだテープで仮止めです。しかし一通りのサーボの動作確認はこの状態でしておきます。各部のサーボを動かして、可動範囲やバランスを見ていきます。
先週作ったXAIO RP2040のコントローラと電池は外出しで、Arduino IDEを使用して動作確認用のモーションを作っていきます。
ソースコード
サーボモータ4個の「ナノ四駆」のスケッチを改造して使います。改造と言っても頭部のサーボモータを追加して、モーションを調整したものです。
「ナノ四駆」のスケッチとモデルは既にこちらで公開しています。
実は「機械生命体ただしザコ」のサーボモータの基本配置は、「ナノ四駆」に円筒形の外装を付けた物とほぼ同じなんですね。ただ、ジャイロが無くてもそこそこ安定した二足歩行を実現するために、脚は平行リンクを採用しています。

お気に入り
このモデルでは「お座りも」できるようになりました。その他のシーンもかわいいですが、この座り方の実物はかなり「かわいい」です。
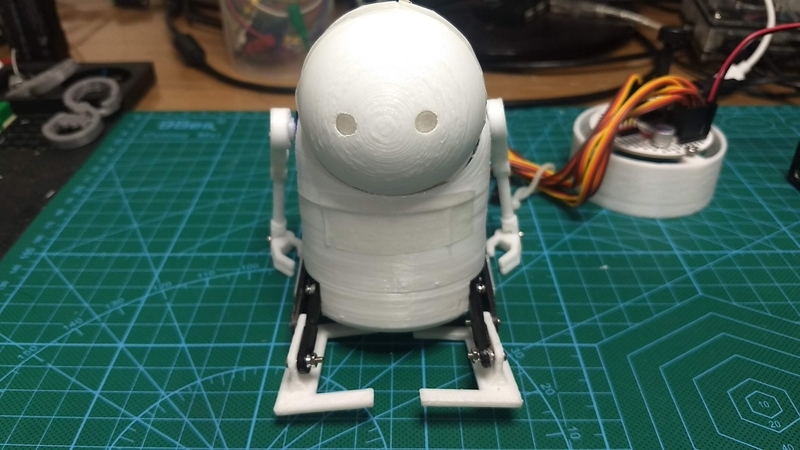
一応
頭部にLEDも追加してあり、ほんとは眼だけが光る予定だったのですが、今使っているシルクPLAでは透過してしまい、ちょっと妖しく見えます。

体重測定
部品が一通り揃った所で再度体重測定です。現在の体重は210グラムでした。なので、電池をリチュームイオンキャパシタにしてもう少し機体をダイエットすれば、150グラムくらいにはなるかもしれません。

おわりに
機体はまだ仮組ですが、ほぼ想定通りのモーションを実行できることが判りました。あとは細かい仕上げと、フィラメントの変更、足裏の滑り止め、もう少し機体の軽量化を行おうと思っています。
機体の動きは良さそうなので、外観をオリジナルに仕上げて早々に公開するつもりですが、仕上げ用の3Dプリンタ(idbox!)の調子悪いので、その修理を優先するかもしれません。

いずれにしても機体制作は今日で一段落で、これからはソフトになりますが、AIもジャイロセンサーが無くてもそこそこ安定しているので、このままでもいいかな。
おしまい
購入品情報
現在使用しているのは、RepRapperのシルクPLAですが、現在白は在庫切れのようです。(RepRapperは在庫切れが多いので気に入った色を見つけたら即買いです。)

シルクPLAの白は2mm厚でも光が漏れるので、それを狙ったなら綺麗なのですが、今回は透過して欲しくないので、以前購入しているシルバーのPLAで試してみようかと思います。
![[Amazonブランド] Eono(イオーノ) シルクPLA3Dプリンターフィラメント、1.75mm PLAフィラメントシルクシルバー、1kgスプール,寸法精度+/- 0.03mm.](https://m.media-amazon.com/images/I/51sQpNrLnWL._SL500_.jpg "[Amazonブランド] Eono(イオーノ) シルクPLA3Dプリンターフィラメント、1.75mm PLAフィラメントシルクシルバー、1kgスプール,寸法精度+/- 0.03mm.")
光が透過しなければ良いのですが・・・フィラメントを変えると眼だけが怪しく光るはずなんですが、ダメならアルミ箔テープで裏からLEDを覆うかな。